Cycle Log 37

Image created with Gemini 3 Pro
Humanoid Robotics, Amazon, and the Compression of Physical Labor (2026–2030)
I. Introduction: Why Physical Labor Automation Is Different
Most discussions of automation fixate on jobs, titles, or headcount. This paper deliberately does not.
Instead, it uses full-time-equivalent (FTE) labor hours as the primary unit of measurement. The reason is simple: companies do not eliminate people first — they eliminate required human labor hours, and only later does that manifest as fewer jobs.
Amazon provides the clearest real-world case study of this process.
II. Amazon as the Physical Automation Baseline
Amazon employs roughly 1.5 million workers globally, with approximately 1 million in the United States. Over the past decade, it has deployed more than 750,000 non-humanoid robots across its fulfillment network.
These robots include:
Mobile drive units
Robotic picking and sorting arms
Vision-guided conveyor systems
Automated packing and routing infrastructure
Crucially, Amazon has never claimed that robots “replaced workers.” Instead, it consistently reports productivity gains and throughput increases — a subtle but important distinction.
When modeled using throughput-per-worker data and facility staffing ratios, Amazon’s automation stack plausibly displaces 800 million to 1.2 billion human labor hours per year.
Using the standard approximation:
1 FTE ≈ 2,000 hours/year
This equates to roughly:
~500,000 full-time-equivalent workers worth of labor hours
Not fired.
Not laid off.
Simply no longer required.
III. The Two Forms of Robotic Replacement at Amazon
Amazon’s automation operates in two fundamentally different regimes:
1. Non-Humanoid Automation (Mature)
Extremely efficient
Task-specific
Requires environment redesign
Replacement ratio ≈ 0.3–0.7x human per task
Massive scale, incremental gains
This is where most of the ~500k FTE-equivalent hours already come from.
2. Humanoid Robotics (Emerging)
Amazon began piloting Digit, a bipedal humanoid robot, in 2023–2024.
Digit’s purpose is not to outperform fixed automation — it is to operate where fixed automation cannot:
Human-designed spaces
Mixed environments
Tasks requiring locomotion + manipulation
Digit represents a form-factor breakthrough, not a speed breakthrough.
3. Why Humanoid Robotics Crosses the Feasibility Threshold (2025–2026)
Although Amazon’s deployment of Digit provides a concrete and conservative case study, it is not the sole—or even the most advanced—signal of where humanoid robotics is headed. Over the past two years, the field has converged toward satisfying all three necessary conditions for economically meaningful humanoid labor replacement:
Body – locomotion, balance, strength, and recovery
Hands – dexterity, grasp diversity, fine manipulation
Mind – high-level task planning, perception, and safe orchestration of sub-skills
On the body axis, the problem is largely solved. Modern humanoids from Tesla (Optimus), EngineAI, Unitree, Figure, and Agility Robotics can already walk, squat, lift, recover from falls, and perform dynamic motions such as running, dancing, and self-righting. These are no longer lab demonstrations; they are repeatable, production-grade capabilities. As with industrial robots before them, once balance and locomotion cross a reliability threshold, marginal improvements rapidly become cost optimizations rather than feasibility questions.
On the hands axis—historically the hardest problem—progress has accelerated sharply. Tesla’s tendon-driven hands, EngineAI’s multi-actuated grippers, and Unitree’s rapid iteration on dexterous manipulation now allow for grasping, tool use, box handling, and basic assembly. While these hands do not yet match human generality, they already exceed the minimum requirements for a large fraction of warehouse, logistics, cleaning, stocking, and light industrial tasks. Importantly, humanoid hands do not need human perfection—they only need to outperform the cheapest acceptable human labor at scale.
The final and previously missing component—the mind—is no longer a blocking factor. Large multimodal foundation models can now act as high-level “drivers” for embodied systems, decomposing tasks into sub-actions, routing perception to motor primitives, and enforcing safety constraints. Crucially, this intelligence does not need to be trained end-to-end inside the robot; it can be modular, cloud-assisted, and continuously updated. Simulation-to-real (sim2real) pipelines—already used extensively by Tesla and others—are reducing training shock and allowing robots to inherit years of virtual experience before ever touching a factory floor.
Taken together, this suggests that by 2026, the industry is likely to field at least one humanoid platform that clears all three checkmarks simultaneously: a stable body, sufficiently capable hands, and a “smart enough” supervisory intelligence. Once that threshold is crossed, scaling dynamics resemble software more than hardware. Unit costs fall, training improves, and deployment accelerates nonlinearly.
This is where pricing asymmetry becomes decisive. Chinese manufacturers such as Unitree and EngineAI are already targeting humanoid price points well below Western equivalents, with credible paths toward sub-$20,000 systems at scale. Even Tesla’s Optimus—built with vertically integrated manufacturing assumptions—has repeatedly signaled long-run costs closer to an entry-level vehicle than an industrial machine. As prices fall, humanoid robots transition from capital equipment to labor substitutes.
Digit, in this framing, represents a form-factor breakthrough, not a speed breakthrough. It demonstrates that humanoids can operate in environments built for humans today. The broader ecosystem shows that once cost, reliability, and intelligence converge—as they are now poised to do—the limiting factor is no longer technological feasibility, but organizational willingness and economic incentive.
IV. What Makes Humanoids Economically Different
The humanoid advantage is not intelligence.
It is substitution.
Humanoid robots:
Fit through doors
Use existing tools
Navigate stairs and aisles
Work at human heights
This enables 1:1 environmental replacement, which avoids the capital cost of rebuilding facilities.
Productivity assumptions used in this paper:
Conservative: 0.5× a human
Nominal: 1.0× a human
Aggressive: 3.0× a human (multi-shift, tireless operation)
Even at 0.5×, humanoids can be economically viable when labor costs exceed amortized robot costs.
V. Cost Structure and the Automation Inflection Point
A human warehouse worker typically costs:
$45k–$70k/year fully loaded
Estimated humanoid robot economics:
Upfront cost: $80k–$150k
Annual maintenance: $5k–$15k
Lifespan: 5–8 years
Annualized robot cost:
~$20k–$35k/year
Once reliability is sufficient, the economic crossover becomes inevitable, even before performance parity.
VI. From Amazon to the US Economy
The US workforce is ~160 million people.
Estimated blue-collar and physical labor pool:
60–70 million workers
Of those, 30–40 million perform work that is at least partially automatable by humanoid or semi-humanoid systems.
Using Amazon as a scaling template, we model displacement in three tiers.
VII. The Three-Tier Adoption Model
Tier 1 — Logistics & Warehousing (Fast)
~60% of displacement
Highly structured
Capital-rich operators
Clear ROI
Tier 2 — Services & Light Physical Work (Medium)
~30% of displacement
Hospitals, retail backrooms, food prep, cleaning
Tier 3 — Other Physical Labor (Slow)
~10% of displacement
Construction support, agriculture assistance, maintenance
VIII. Timeline: 2026–2030
2026:
Early humanoid deployment
~0.5–1.0% of US labor hours displaced (physical labor only)2027:
Reliability thresholds crossed
~1–2% displaced2030:
Scaled deployment across Tier 1 and Tier 2
~3–6% of total US labor hours displaced
(≈ 5–10 million FTE-equivalent workers)
Again: hours, not immediate unemployment.
IX. Amazon’s Example
Amazon proves that:
Labor can be removed without firing workers
Automation scales silently
Productivity gains hide structural displacement
Humanoid robots are not the beginning of physical labor automation — they are the accelerant.
They transform automation from:
“Where can we redesign the world for machines?”
to
“Wherever humans already work.”
That is the real inflection.
X. Cross-Paper Synthesis: When Cognitive and Physical Automation Converge
In my previous paper on white-collar job loss driven by advancing AI intelligence, we estimated that by roughly 2027, structural displacement in laptop-native, cognitive work could plausibly reach 6–11% of the total workforce, primarily through hiring cliffs, non-backfill, and organizational compression rather than immediate mass layoffs.
This paper examined a separate, orthogonal force: the automation of physical labor via industrial robotics and emerging humanoid systems. Using conservative FTE-hour modeling, we estimated that by 2027–2030, blue-collar and physical labor displacement could account for an additional 3–6% of workforce-equivalent labor hours, beginning in logistics and warehousing and expanding outward as humanoid reliability improves.
When these two forces are combined, the picture changes qualitatively.
Rather than isolated sectoral disruption, the economy begins to experience simultaneous compression at both ends of the labor spectrum:
White-collar displacement (AI cognition): ~6–11%
Blue-collar displacement (robotics & humanoids): ~3–6%
Combined structural displacement range:
~9–17% of total workforce-equivalent labor hours
Importantly, this does not imply that 9–17% of people are immediately unemployed in a single year. As emphasized throughout both papers, displacement manifests first as:
hiring freezes
elimination of entry pathways
reduced hours per worker
contractor and temp labor collapse
non-replacement of attrition
However, even under “soft absorption” scenarios, a displacement of this magnitude begins to rival or exceed the labor impact of major historical recessions, with a critical difference:
this time, the shock is driven not by collapsing demand, but by radically cheaper production of both thinking and doing.
By the late 2020s, the economy risks entering a regime where:
output and GDP can remain stable or grow,
corporate margins improve,
but human labor participation structurally declines across multiple strata simultaneously.
This creates a novel and unstable condition:
productivity rises while opportunity contracts, not only for one class of worker, but across both cognitive and physical domains.
Taken together, the white-collar AI curve and the blue-collar robotics curve suggest that the coming disruption is not a single wave, but a converging pincer movement—AI intelligence compressing knowledge work from above, and embodied automation compressing physical labor from below.
The central question, therefore, is no longer whether large-scale labor displacement will occur, but how societies adapt when both the mind and the body of economic production no longer require human participation at previous scales.
That question lies beyond the scope of this paper—but it is no longer theoretical.
XI. Conclusion (Full-System View): What “Work Becoming Optional” Actually Requires
Combining the white-collar displacement curve driven by advancing AI intelligence with the blue-collar displacement curve driven by robotics and humanoid embodiment, a conservative synthesis suggests ~9–17% workforce-equivalent disruption within roughly five years. As emphasized throughout both papers, this disruption initially manifests through hiring cliffs, non-backfill, reduced hours, and the collapse of entry pathways, rather than immediate mass unemployment.
However, the more important implication is not the five-year window itself, but what follows.
Automation does not plateau once a given displacement percentage is reached. Once feasibility thresholds are crossed and systems begin scaling down the cost curve, both AI cognition and robotic embodiment tend to improve and diffuse in a manner more similar to consumer technology than to traditional industrial capital. In that regime, displacement becomes cumulative and compounding, not cyclical.
For “work” to become optional—as has been suggested by figures such as Elon Musk—two distinct conditions must be met:
1. Technical Optionality: Autonomous Productive Capacity
Work becomes technically optional when automated systems are capable of producing society’s core goods and services—food, logistics, manufacturing, maintenance, and information work—at scale with minimal human labor. Based on current trajectories in large language models, industrial automation, and humanoid robotics, this condition plausibly emerges in the early-to-mid 2030s. At that point, the economy no longer requires universal human labor participation to maintain baseline material output.
2. Economic Optionality: Access Without Labor Coercion
Work becomes economically optional only when people can reliably access housing, food, healthcare, and basic services without being forced to sell labor. There are multiple, non-exclusive pathways by which this could occur:
Direct income mechanisms, such as universal basic income, negative income tax systems, or automation dividends funded by highly productive capital.
Personal or household automation, where individuals effectively own or lease productive machines—humanoid robots, autonomous systems, or AI services—that generate economic value on their behalf, analogous to sending “capital” to work instead of oneself.
Radical cost deflation, where automation drives the marginal cost of essentials low enough that survival and basic comfort require far less income than today.
Public or collective ownership of automated infrastructure, allowing productivity gains to be distributed through services rather than wages.
Absent these mechanisms, technical abundance alone does not eliminate economic coercion; it merely concentrates leverage in those who own automated systems.
Under plausible continuation of current trends, the world could therefore enter a transitional decade:
Late 2020s: rising structural unemployment pressure, shrinking labor share, increasing precarity.
Early-to-mid 2030s: work becomes technically optional for most baseline economic output.
Mid-to-late 2030s and beyond: work becomes economically optional for most people only if institutions, ownership models, and distribution systems adapt accordingly.
The central risk is not that automation fails, but that it succeeds faster than social and economic systems can reorganize. In that case, societies may experience prolonged instability even amid material abundance.
The central opportunity is that, for the first time in history, humanity may possess the means to decouple survival from labor. Whether that results in widespread freedom or widespread exclusion is not a question of engineering—it is a question of collective choice.






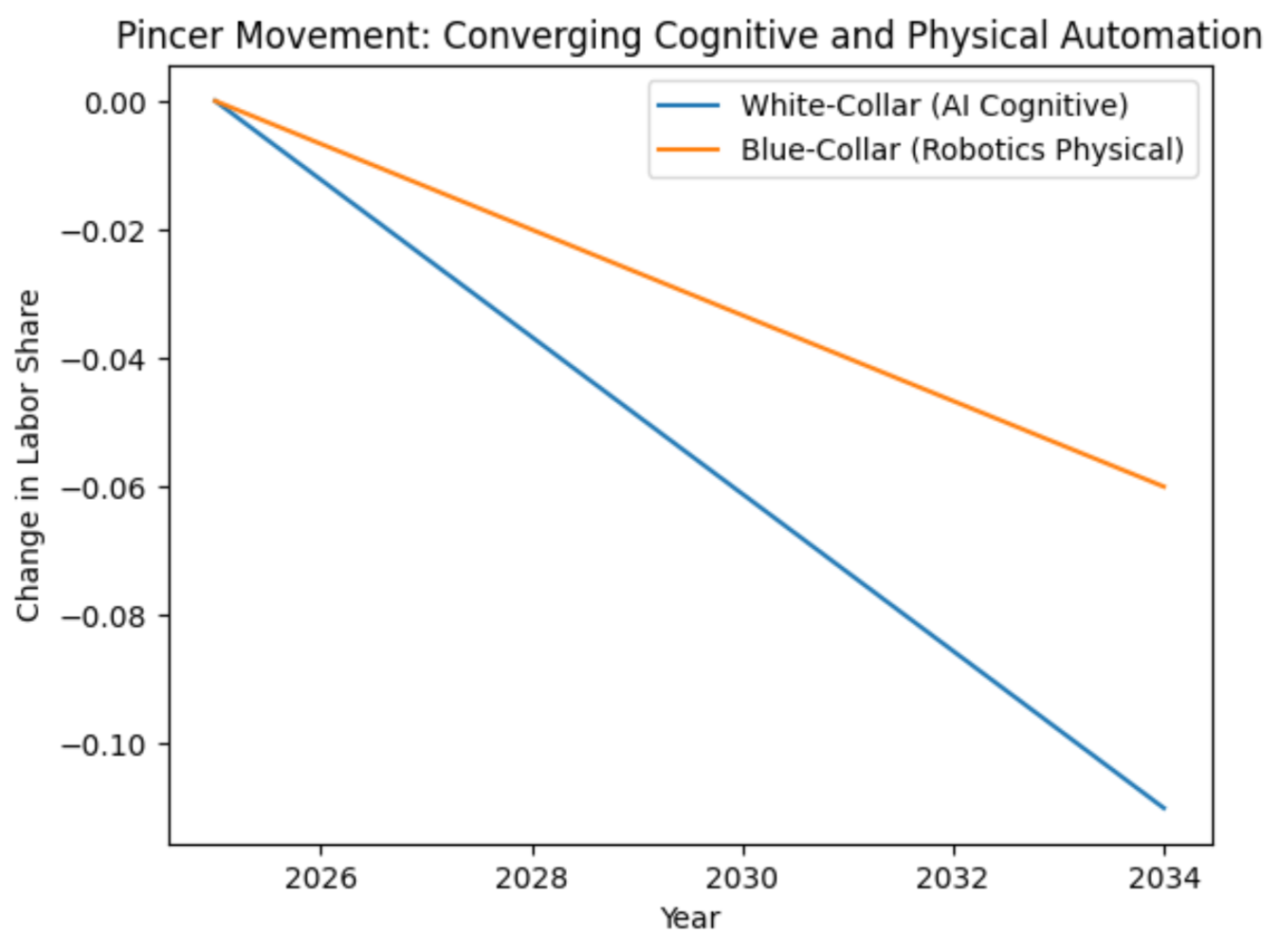

Figure 1. Projected Humanoid Robotics Impact on Blue-Collar Labor (2026–2030)
Estimated displacement of human labor measured in full-time-equivalent (FTE) hours under three adoption scenarios. The low, mid, and high curves represent conservative, baseline, and aggressive humanoid robotics deployment trajectories across logistics, services, and other physical labor sectors. Displacement accelerates after 2027 as humanoid systems cross reliability and cost thresholds, illustrating how embodied automation compounds over time rather than progressing linearly.
Figure 2. Tiered Breakdown of Humanoid Robotics Displacement by Job Category in 2030
Projected FTE-equivalent labor displacement by 2030, segmented into three tiers based on task structure and adoption speed. Tier 1 (logistics and warehousing) absorbs the majority of displacement due to high task repeatability and existing automation infrastructure. Tier 2 (services and light physical work) follows as humanoid dexterity and autonomy improve. Tier 3 represents slower-adopting physical roles constrained by regulation, environment variability, or safety requirements.
Figure 3. Combined White and Blue-Collar Automation Impact (2026–2030)
Projected share of total workforce FTE-equivalent labor displaced by advancing AI intelligence (white-collar) and robotic/humanoid automation (blue-collar). Ranges represent conservative (low), baseline (mid), and aggressive (high) adoption scenarios. Displacement reflects labor hours removed from human execution, not immediate unemployment, with effects initially appearing as hiring freezes, non-backfill, and contractor reduction before surfacing in headline labor statistics.0
Figure 4. Amazon Automation Scaling: Robots vs. Labor Hours Removed (2013–2024)
This figure illustrates the steady growth of Amazon’s deployed robotics fleet alongside an estimated increase in full-time-equivalent (FTE) labor hours removed through automation. Importantly, the relationship is not one-to-one: robots scale faster than visible labor reduction because automation first manifests as throughput gains, reduced overtime, and non-replacement of attrition rather than direct layoffs. This highlights why labor displacement can remain largely invisible in headline employment statistics even as required human labor hours decline materially.
Figure 5. Humanoid Robotics Feasibility Thresholds: Body, Hands, and Mind
Visualizes the relative maturity of the three necessary conditions for economically meaningful humanoid deployment. Locomotion and balance (“Body”) have largely crossed reliability thresholds, dexterous manipulation (“Hands”) has reached a good-enough level for logistics and light physical work, and supervisory intelligence (“Mind”) is no longer a blocking constraint due to LLM-based task orchestration. The simultaneous clearing of these thresholds enables a nonlinear transition from experimental pilots to scalable deployment.
Figure 6. Cost Crossover Between Human Labor and Humanoid Robots (Annualized)
Compares the fully loaded annual cost of a human warehouse worker with the declining annualized cost of a humanoid robot as prices fall and amortization improves. Even without performance parity, humanoid systems become economically viable once their annualized cost undercuts human labor, especially given multi-shift operation and reduced marginal cost of scale. This cost asymmetry drives adoption regardless of whether robots exceed human productivity.
Figure 7. The Pincer Movement: Converging Cognitive and Physical Automation
Illustrates the converging compression of labor share from two independent forces: AI-driven cognitive automation impacting white-collar work, and robotics-driven physical automation impacting blue-collar labor. Cognitive displacement accelerates earlier, while physical displacement lags but broadens over time. Together, they form a sustained pincer movement that reduces overall labor participation even as output and productivity can continue to rise.
Figure 8. Three-Tier Physical Labor Automation Adoption Trajectories (2026–2030)
Shows projected displacement of physical labor hours across three adoption tiers. Logistics and warehousing lead due to structured environments and clear ROI, followed by services and light physical work, with other physical labor adopting more slowly due to environmental complexity and liability constraints. The staggered curves emphasize that automation diffusion is phased, cumulative, and uneven rather than a single synchronized shock.
KG Seed Map for this paper
KG_LLM_SEED_MAP:
meta:
seed_id: "kgllm_seed_humanoid_robotics_physical_labor_2026_2030_v3"
author: "Cameron T."
scope: >
Amazon robotics → humanoid feasibility → FTE-hour displacement →
blue-collar labor compression → convergence with AI-driven cognitive automation
intent:
- "Model labor displacement using labor-hours as the primary unit."
- "Explain why humanoid feasibility creates nonlinear adoption dynamics."
- "Integrate physical and cognitive automation into a single macro framework."
methodological_axioms:
labor_hours_first:
statement: >
Firms eliminate required human labor hours before eliminating job titles.
Job loss, unemployment, and labor force participation are lagging indicators
of structural labor compression.
implication:
- "Displacement is initially invisible in headline labor statistics."
- "Hiring freezes and non-backfill dominate early phases."
displacement_vs_unemployment:
clarification: >
Structural displacement refers to reduced demand for human labor-hours,
not immediate unemployment or layoffs.
feasibility_phase_transition:
definition: >
A nonlinear adoption inflection point that occurs once humanoid robots
simultaneously satisfy minimum thresholds for body, hands, and mind,
shifting deployment dynamics from experimental to economic.
properties:
- "Adoption accelerates even if per-unit capability improves slowly."
- "Cost decline becomes more important than raw performance."
- "Organizational willingness replaces technical feasibility as the bottleneck."
P2_humanoid_feasibility_convergence:
three_checkmarks:
body:
status: "Solved for economic use"
threshold_definition:
- "Stable locomotion"
- "Self-righting"
- "Load handling within human environments"
hands:
status: "Good-enough dexterity achieved"
threshold_definition:
- "Reliable grasping of diverse objects"
- "Tool use sufficient for logistics, cleaning, stocking"
mind:
status: "Supervisory intelligence sufficient"
threshold_definition:
- "LLM-based task decomposition"
- "Safe orchestration of sub-skills"
- "Cloud-updatable cognition"
phase_transition_claim:
statement: >
By 2026, at least one commercially relevant humanoid platform is likely
to cross all three thresholds simultaneously, triggering nonlinear scaling.
macro_convergence:
cognitive_automation:
source: "Large language models and AI systems"
affected_domain: "White-collar, laptop-native labor"
displacement_range_2027: "6–11%"
physical_automation:
source: "Industrial robotics and humanoid embodiment"
affected_domain: "Blue-collar and physical labor"
displacement_range_2030: "3–6%"
convergence_effect:
description: >
Simultaneous compression of cognitive and physical labor produces
economy-wide opportunity contraction rather than sector-specific disruption.
combined_range:
workforce_equivalent_displacement: "9–17%"
characterization:
- "Not a single shock"
- "A sustained pincer movement"
adoption_dynamics:
pre_threshold:
pattern: "Incremental, capex-limited deployment"
post_threshold:
pattern: "Software-like diffusion layered onto hardware"
drivers:
- "Rapid learning curves"
- "Falling unit costs"
- "Organizational imitation effects"
- "Competitive pressure"
work_optionality_framework:
technical_optionality:
definition: >
Automated systems can produce core goods and services at scale
with minimal human labor participation.
estimated_timing: "Early-to-mid 2030s (plausible)"
economic_optionality:
definition: >
Humans can access housing, food, healthcare, and services without
being forced to sell labor.
enabling_mechanisms:
- "Direct income supports (UBI, negative income tax)"
- "Automation dividends"
- "Personal or household automation ownership"
- "Radical cost deflation of essentials"
- "Public or collective ownership of automated infrastructure"
critical_warning:
statement: >
Technical abundance alone does not eliminate economic coercion;
ownership and distribution determine outcomes.
systemic_risk_and_opportunity:
risk:
description: >
Automation succeeds faster than institutions adapt, leading to
prolonged instability despite material abundance.
opportunity:
description: >
First historical chance to decouple survival from labor
if productivity gains are broadly distributed.
final_meta_takeaways:
T1: >
Labor displacement should be measured in hours, not jobs.
T2: >
Humanoid feasibility represents a phase transition, not a linear improvement.
T3: >
Cognitive and physical automation are converging into a single macro shock.
T4: >
Work becomes optional only when technical capacity and economic access align.
T5: >
The outcome of this transition is not determined by engineering,
but by institutional and ownership choices.
Combined Master KG-Seed Map for White Collar and Blue Collar Displacement Theories
KG_LLM_MASTER_SEED_MAP:
meta:
seed_id: "kgllm_master_seed_cognitive_plus_physical_labor_compression_2025_2035_v1"
author: "Cameron T."
scope: >
GPT-class cognitive automation + industrial & humanoid robotics →
FTE-hour displacement → organizational redesign →
macro labor compression → work optionality conditions
intent:
- "Unify white-collar (cognitive) and blue-collar (physical) automation into a single analytical framework."
- "Model labor displacement primarily via labor-hours, not job titles."
- "Explain nonlinear adoption, threshold cascades, and convergence effects."
- "Preserve conservative forecasting while identifying structural phase transitions."
epistemic_status:
grounded_facts:
- "LLM capabilities have increased rapidly across reasoning, coding, and professional benchmarks."
- "Amazon operates ~750k+ non-humanoid robots and pilots humanoid systems."
- "Multiple firms (Tesla, Unitree, EngineAI, Figure) have demonstrated functional humanoids."
modeled_inferences:
- "Labor impact accelerates once reliability thresholds are crossed."
- "Displacement first appears as reduced hiring and hours, not layoffs."
- "Feasibility + cost convergence triggers nonlinear scaling."
key_limitations:
- "No single benchmark spans GPT-2 → GPT-5.2 with identical protocols."
- "Humanoid generalization constrained by safety, liability, and deployment friction."
- "Employment outcomes mediated by policy, demand elasticity, and ownership structure."
# =========================
# CORE METHODOLOGICAL AXIOMS
# =========================
methodological_axioms:
labor_hours_first:
statement: >
Firms eliminate required human labor hours before eliminating job titles.
Job loss, unemployment, and labor force participation are lagging indicators
of structural labor compression.
implications:
- "Displacement is initially invisible in headline labor statistics."
- "Hiring freezes, non-backfill, and hour compression dominate early phases."
displacement_vs_unemployment:
clarification: >
Structural displacement refers to reduced demand for human labor-hours,
not immediate measured unemployment or mass layoffs.
task_vs_job_rule:
heuristic: >
Headcount reduction ≈ one-third to one-half of the automatable task share,
due to verification, liability, coordination, and exception handling.
# =========================
# CORE THESIS
# =========================
core_thesis:
statement: >
Automation impacts labor through threshold cascades, not linear substitution.
Cognitive AI compresses white-collar labor via reliability and parallelism;
robotics and humanoids compress physical labor via form-factor substitution.
When these forces converge, labor participation declines structurally
even as output and GDP can remain stable or grow.
# =========================
# COGNITIVE AUTOMATION (WHITE COLLAR)
# =========================
cognitive_automation_domain:
scope:
definition: "Laptop-native, well-specified cognitive work in digital environments."
excludes:
- "Physical labor"
- "Embodied systems"
- "Factories and warehouses"
capability_curve:
model_family: "Logistic / S-curve (conceptual)"
human_gap_closed_estimates:
GPT_2_2019: "5–10%"
GPT_3_2020: "20–25%"
GPT_3_5_2022: "35–40%"
GPT_4_2023: "50–55%"
GPT_5_1_2024: "55–60%"
GPT_5_2_2025: "65–75%"
extrapolation:
2026: "78–82%"
2027: "83–90%"
key_claim: >
Economic impact accelerates once reliability thresholds are crossed,
even if raw benchmark gains appear incremental.
reliability_threshold_effect:
description: >
GPT-5.2 crosses a reliability threshold enabling AI-first drafting
with humans as validators rather than primary producers.
organizational_consequence:
- "Junior production layers collapse first."
- "One validator can oversee many AI drafts."
affected_workforce:
US_total_employed: "~160M"
AI_amenable_pool: "25–35M"
displacement_scenarios:
upgrade_5_1_to_5_2:
incremental_jobs_displaced: "2.5–5.3M"
mechanism:
- "Hiring freezes"
- "Non-backfill"
- "Contractor reduction"
adopt_5_2_from_none:
total_jobs_displaced: "5–10.5M"
share_of_workforce: "3–6%"
2027_steady_state:
headcount_compression: "40–50% of AI-amenable roles"
total_jobs_equivalent: "10–18M"
share_of_workforce: "6–11%"
labor_market_signature:
early:
- "Entry-level openings collapse"
- "Experience requirements inflate"
later:
- "Wage bifurcation"
- "Productivity-pay decoupling"
# =========================
# PHYSICAL AUTOMATION (BLUE COLLAR)
# =========================
physical_automation_domain:
scope:
definition: "Physical labor across logistics, services, and light industrial work."
amazon_baseline:
workforce:
global: "~1.5M"
US: "~1.0M"
robots:
non_humanoid: "~750k+"
humanoid: "Digit (pilot)"
estimated_labor_hours_removed:
annual: "800M–1.2B hours"
FTE_equivalent: "~500k"
displacement_mechanism:
- "Throughput gains"
- "Reduced overtime"
- "Shift compression"
non_humanoid_automation:
maturity: "High"
replacement_ratio: "0.3–0.7x human"
constraint: "Requires environment redesign"
humanoid_feasibility:
three_checkmarks:
body:
status: "Solved for economic use"
criteria:
- "Stable locomotion"
- "Self-righting"
- "Load handling"
hands:
status: "Good-enough dexterity"
criteria:
- "Multi-grasp"
- "Tool use"
mind:
status: "Supervisory intelligence sufficient"
criteria:
- "LLM-based task decomposition"
- "Cloud-updatable cognition"
phase_transition:
claim: >
By ~2026, at least one humanoid platform clears all three thresholds,
triggering nonlinear adoption dynamics.
replacement_ratios:
early: "0.5–1.0x human"
mature: "1–3x human (multi-shift, tireless)"
cost_structure:
human_worker: "$45k–$70k/year"
humanoid_robot:
annualized_cost: "$20k–$35k/year"
US_extrapolation:
blue_collar_pool: "60–70M"
humanoid_amenable: "30–40M"
displacement_timeline:
2026: "0.5–1.0% of US labor hours"
2027: "1–2%"
2030: "3–6% (≈5–10M FTE-equivalent)"
# =========================
# FEASIBILITY PHASE TRANSITION
# =========================
feasibility_phase_transition:
definition: >
A nonlinear inflection point where systems become economically deployable
at scale even without perfect generality.
properties:
- "Adoption accelerates despite slow marginal improvements."
- "Cost decline dominates capability gains."
- "Organizational willingness replaces technical feasibility as bottleneck."
# =========================
# CONVERGENCE (PINCER MOVEMENT)
# =========================
macro_convergence:
description: >
Cognitive automation compresses labor from above; physical automation
compresses from below, creating economy-wide opportunity contraction.
combined_displacement:
range: "9–17% of workforce-equivalent labor hours"
characteristics:
- "Not a single shock"
- "Cumulative and compounding"
- "GDP can grow while participation falls"
# =========================
# ADOPTION DYNAMICS
# =========================
adoption_dynamics:
pre_threshold:
pattern: "Incremental, capex-limited"
post_threshold:
pattern: "Software-speed diffusion layered onto hardware"
drivers:
- "Learning curves"
- "Cost compression"
- "Competitive imitation"
# =========================
# WORK OPTIONALITY FRAMEWORK
# =========================
work_optionality:
technical_optionality:
definition: >
Automated systems can produce core goods and services
with minimal human labor.
timing: "Early-to-mid 2030s (plausible)"
economic_optionality:
definition: >
Humans can access necessities without selling labor.
enabling_mechanisms:
- "UBI / negative income tax"
- "Automation dividends"
- "Personal robot or AI ownership"
- "Radical cost deflation"
- "Public ownership of automated infrastructure"
warning:
statement: >
Technical abundance without economic access
concentrates power and increases instability.
# =========================
# SYSTEMIC RISK & OPPORTUNITY
# =========================
systemic_outcomes:
risk:
description: >
Automation succeeds faster than institutions adapt,
causing prolonged instability amid abundance.
opportunity:
description: >
First historical chance to decouple survival from labor
if productivity gains are broadly distributed.
# =========================
# FINAL META TAKEAWAYS
# =========================
final_meta_takeaways:
T1: "Measure displacement in hours, not jobs."
T2: "Thresholds matter more than linear capability gains."
T3: "Cognitive and physical automation converge into a single macro force."
T4: "Work becomes optional only when technical and economic conditions align."
T5: "Outcomes depend on ownership, institutions, and distribution—not engineering alone."